
目前,国内很多地区交管部门开始使用移动式雷达测速仪(如车载式测速仪、路侧式测速仪)进行执法。该测速仪具备测速、抓拍、车牌识别等功能,如图1所示。这种测速仪属于强制检定的法制管理计量器具,所以对其性能及检测方法应给予充分的重视。

图1车载式(左图)与路侧式(右图)雷达测速仪示意图
一、测速原理及实施中存在的问题
应用Doppler原理检测机动车速度的雷达测速仪无论选择哪种安装方式都与被测车辆存在一定的角度θ,测速原理见式(1):

式中:fd——Doppler频率,Hz;v——机动车行驶速度,m/s;c——光速,m/s;f0——雷达发射频率标称值,Hz;θ——雷达波与行使车辆的夹角,°。
移动式雷达测速仪工作过程如图2所示,雷达发射波的不同波瓣角直接决定了测速区域的大小,假设每条车道宽4m,雷达波瓣角度为12°,雷达沿道路中心夹角θ为20°。则
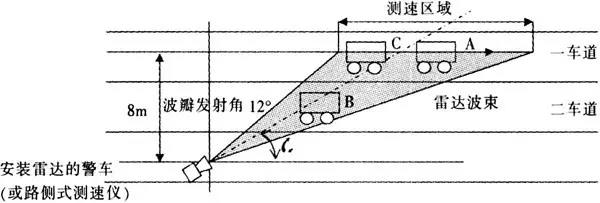
图2移动式雷达测速仪工作示意图
测速仪在一车道的测速区域=8m×(cot14°-cot26°) =16m
这就可能出现测速区域内存在多辆机动车的情况:同一车道测速区域内出现多辆机动车,如图2中A、C两辆车所示。不同车道测速区域内出现多辆机动车,如图2中A、B两辆车所示。
由于多辆机动车同时出现在测速区域内而使测速仪接收到多个Doppler回波信号,若某一机动车出现超速行为则测速仪抓拍到的照片会出现多辆机动车,如图3所示。测速仪不能分辨哪一辆车是超速车辆,故这种照片不能作为处罚依据。这种现象的发生影响了测速仪的使用效率,同时也给交管部门的执法工作带来了不便。

图3超速车难分辨或错抓实测效果图
造成以上问题的主要原因是:测速仪的测速区域过大或其安装方式不合理。对此,可以采取一些措施进行改进,如采用较小波瓣角的雷达或提高测速仪安装高度以减小测速区域;对雷达监测的速度值进行比较判断,删除相邻速度值发生较大波动的异常数据。应用这些方法,可以较好地解决上述问题。
二、检测方法分析
由式(1)可知,要得到速度v需要知道4个量:Doppler频率fd、雷达发射频率标称值f0、光速c、机动车行驶方向与雷达发射波夹角θ。
其中,fd为被测机动车的Doppler频率,可以通过速度模拟装置进行模拟,c为光速,f0为雷达发射频率标称值,θ为机动车行驶方向与雷达发射波夹角,可以测量。所以要完成对测速仪的检测工作需要以下三步:
第一步,应用雷达测速仪检定装置完成测速仪模拟检测包括测速范围、示值误差和雷达发射频率标称值f0。
第二步,检测θ夹角,雷达测速仪安装过程中与机动车行驶方向有一个固定安装角度,设备供应商应提供这个值以及雷达安装的水平、垂直定位基准以供计量检测机构测量。
第三步,现场实车检验。通过现场实车可以检验测速仪的测量值是否符合要求,只有测量值符合要求,才能证明测速仪软件中θ夹角和其他参数的设置与实际安装情况相符合。

国内计量技术机构的雷达测速仪模拟检测技术已经比较成熟,测量雷达发射波与机动车行驶方向θ夹角则需要设备供应商提供雷达安装θ夹角标称值和其安装基准。如果测速仪型批试验中已经进行了充分的大样本现场实车试验,并且包括了一定比例的高速行驶车辆试验,那么完成包含测速范围、示值误差和雷达发射频率的模拟检测和雷达安装角度的检测后,只需要采用低速检测车或利用社会车辆进行检定即可。这种方法可以较好地解决周期检定过程中现场实车试验存在的执行困难和风险较大的问题,值得国内机动车测速计量技术领域对此进行深入的研究和广泛的讨论。
三、结束语
移动式雷达测速仪使用方便、灵活,在全国各地得到了广泛的应用,但由于雷达选型及安装方式引发的问题,设备供应商应该给予充分的关注并加以改进。本文所提出的检测方法如能得以施行,既可以高效、合理地完成雷达测速仪的检定工作又可以节约社会资源。此方法同样适用于固定安装于道路上方的监测系统。
•联系人:徐先生
•销售电话:18042002123(同微信号)非售后
•QQ:464333839
•地址:杭州市余杭区亿丰蔚蓝郡雅苑3幢10(商)