
测量角度对雷达实测值的影响
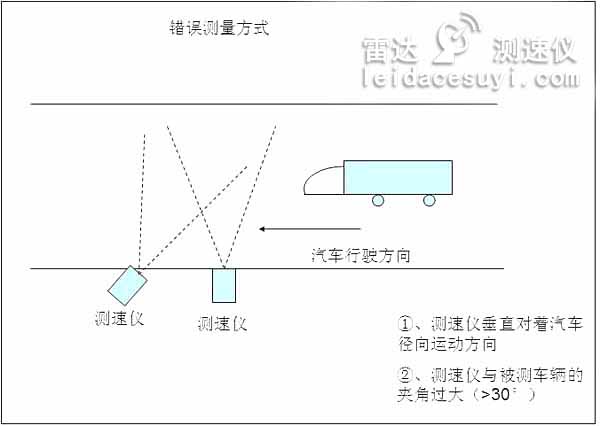
雷达的实际测量误差与它的测量角度有关,当角度掌握不当时,测量值会与真实速度偏离。雷达在理论设计时要求测量角度为0度,,既要求雷达实测位置轴线与目标车行车轴线重叠,雷达的轴线向车头或车尾瞄准后进行测量。但在实际使用中,为了安全等因素,这一点很难做到。假设测速仪与车道的夹角为测量角α,汽车速度为V,测速仪发射波的波长为l,Fd为多普勒频率。那么根据多普勒原理:
Fd=2V/(l*cosα)
有上次可以看出,在多普勒频率不变的情况下(即测得的速度不变),测量角度α的变化会影响测量速度。不过当存在一个小的测量角度时,其影响是很小的。假设雷达与行车线的距离为H,雷达到目标的斜线距离为S,测量角为α,经计算经计算可得到距离雷达10倍H的目标(即S=lOH)测量误差为±0.55%,那么这个误差是非常小的,基本对速度没影响可以满足交警测速的要求。
雷达测速仪角度的校正
雷达的测速仪一般分为手持式、车载式和固定式三种。手持式的雷达机动灵活、结构简单,一般只对目标车速进行测量和记录。按规程要求,使用手持式雷达测速仪能够测量距离(S)10倍于测速仪到行车线的距离(H)的目标车,该种雷达测速仪在工作中一般不需要角度修正。高清移动测速仪都配套装有摄像或拍照设备。由于高清网络摄像机拍摄距离问题,所以为了取得较好的抓拍效果,这两种雷达测速仪与测量目标车的距离(S)如果不能满足10倍于雷达测速仪到行车线的距离(H),那么就需要对此雷达测速仪进行角度校准。在实际使用中在实际使用中,我们需要调整雷达测速仪与车道的夹角为10-30度之间,确保满足S=10(h),另外需要对该雷达的计量数量进行横向和纵向角度修正,使雷达的显示速度等于目标的实际速度。角度修正是由外配计算机用数学模型和程序软件进行调整的,这些调整必将影响仪器的原始测量准确度。所以在实际工作中,有必要对雷达测速仪角度修正后的误差进行检测。

雷达测速仪角度修正后的误差检测方法
将被测雷达与测试通道置于同一轴线上进行检测
1.目前,雷达有两种方式实现角度修正功能,第一种是雷达的角度修正值可用软件根据雷达的实际架设角度而设定的方式,即可变角度补偿式雷达。第二种为雷达的角度修正值不可改变的方式,即固定角度补偿式雷达。
2.在检测雷达的角度修正误差时,根据角度修正原理提供多普勒信号的低频信号发生器的频率F,可用两种方式
①、F=Fd ②、F=Fdcosα
3. 雷达进行角度修正后,其测速范围和测速的最大允许误差应符合JJG528—2O04(机动车雷达测速仪》检定规程的计量技术要求。对于无角度修正功能的雷达,不做角度修正误差的检测。
角度校正在实际使用中应注意的问题
在实际使用中,由于现有雷达大都没有标注调整角度的刻度,在其安装和使用基本上是依靠人为估计,再进行角度修正的。也就是说,雷达架设位置的实际角度与该雷达配置的计算机软件修正的角度不一定是对应无误的。这样一来 .雷达配置的计算机角度修正及显示数值的意义就会大打折扣。
因此建议:
1.生产厂家在生产车载式或固定式雷达时.对角度调整部位进行横向和纵向的角度标注。
2.公安交通部门在使用雷达的过程中.应严格按其架设角度进行角度修正,以保证雷达测量数据的准确性。
•联系人:徐先生
•销售电话:18042002123(同微信号)非售后
•QQ:464333839
•地址:杭州市余杭区亿丰蔚蓝郡雅苑3幢10(商)