
- 超速自动监测系统比较常用的主要有雷达、激光、地感线圈以及视频等,再辅以适当的拍照记录传输系统就构成了各种监测系统,为了方便大家了解和认识,现对超速拍照原理进行详细的介绍。
一、视频测速原理
最早出现的视频原理测速监测系统是虚拟线圈视频测速系统,即在视频图像中的车道上,相距(30-50)m处设两个虚拟线圈,由于摄像机采集图象的速度是一定的(x秒/帧),通过计算图片的帧数可以得到经过的时间,利用车辆通过两个虚拟线圈的时间差,就可得出车辆的运行速度。其优点是简单方便、不破坏路面、不用更换线圈。该测速原理最主要的缺点是测速误差大,容易受到光照等因素的影响;其次,凡经过虚拟线圈的物体均被记录下来,无效数据多、误判车辆多;再次,一次只能对一个车道的一辆车进行测速,两辆车或数辆车同时经过时无法测速,更无法判别其是否超速。由于误判车辆较多及测速误差太大,目前视频测速基本已被淘汰。

二、测速多普勒原理
雷达为英文Radar一词的译音。雷达用于测速主要是应用了多普勒原理,当一定发射频率的雷达波束射到移动目标时,其反射频率携带的目标速度信息与发射频率不同,两者之差称为多普勒频率,多普勒频率与目标的移动速度成正比。当目标向雷达天线靠近时,反射信号频率将高于发射机频率;反之,当目标远离天线方向而去时,反射信号频率将低于发射机频率。使用雷达测速对角度的要求较高,测速系统应正对运动物体的移动方向,当测速角度小于5°时,对测量结果的影响不大于1km/h,通常可以忽略不计;否则,应对角度带来的Cosine效应进行修正,以保证测量结果的准确可靠。
雷达原理的监测系统应用广泛,具有技术成熟、价格相对较低等优点,容易推广。目前,使用较多的是一种窄波束高性能雷达,它的波瓣角约在4°-6°,测速时间可以达到几十个毫秒。窄波束高性能雷达与早期宽波束雷达相比较更适于对单车道超速情况进行监控。宽波速雷达的雷达波发射锥角度一般在10°-30°间,扫描面比较广,监测区域大,当相邻车道两车并排进入超速监测区域或同车道两车连续进入超速监测区域时,雷达监测系统无法明确认定哪一部车辆违规,很容易造成错抓误判。宽波束雷达的测速时间一般为几百毫秒,因此,车速过高的车辆经过监测区域一段距离后才能测出它的速度,这时可能已来不及捕捉其图像信息,从而造成漏抓或误抓的情况。因此,宽波束雷达不适用于单车道的车速监测系统。
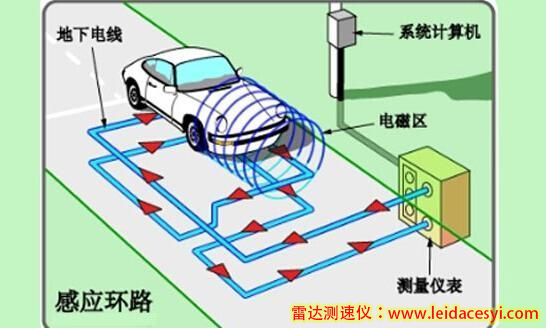
三、地感线圈测速原理
地感线圈测速一般要用到两个线圈,两个线圈之间区域即为超速监测区域。当机动车进入第一个线圈时会在电路中产生电磁感应,同时触发计时器开始计时;走出第二个线圈后,计时结束,根据两个线圈之间的距离和产生感应的时间差,以距离除以时间就可以算出车辆通过超速监测区域时的速度。有时为提高测速准确度,可以加入第三个线圈,取得车辆经过各线圈时的平均值,将其作为测量值。相对于其它测速方式,该系统因没有更多精密高智能化的设备却能获得比较高的捕获率,因此性价比较高。其不足之处是安装施工时会破坏路面,影响路面寿命,且线圈在地下容易受环境影响而发生形状改变,,还受重型车辆挤压、路面修理等损坏,使用2-3年就需要更换线圈,实际维修养护费用高于其它测速设备。
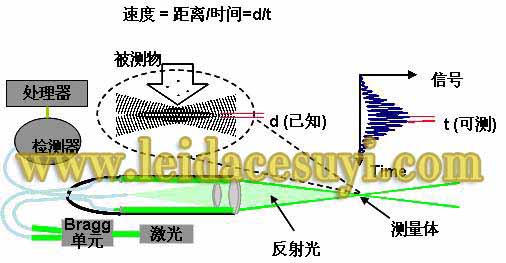
四、激光测速原理
激光测速原理也被称作激光雷达原理(Ladar,Laser Detection And Ranging),即激光探向与测距之意。Ladar设备采用红外线半导体激光二极管发射出一定频率极窄的光束精确地瞄准目标,通过测量红外线光波在Ladar设备与目标之间的传送时间来决定速度。由于光速是固定的,激光脉冲传送到目标再折返的时间会与距离成正比。以固定间隔发射两个脉冲,即可测得两个距离;将此两距离之差除以发射时间间隔即可得到目标的速度。在理论上,发射两次脉冲即可测量速度。而实际上为避免错误,一般Ladar设备在一秒钟内发射高达上千组的脉冲波,以最小平方法求其平均值计算目标速度,就可以得到非常准确的速度。测速时间可以达几毫秒至几十毫秒,相比雷达具有更高的测速准确度;同时,Ladar的发射锥角度只有不到0.1°,其狭窄光束使两车被同时侦测到的机会等于零,因此,以Ladar测速可以明确认定受测目标。这些特性使Ladar监测系统在较高车流量的路况上能够准确地工作。
现在比较准确的是精确视频机动车测速系统,该系统主要采用了目标识别与目标跟踪技术。这些技术原来主要用于航天领域。目标识别技术为图象的特征模式识别,其基本原理是对所要识别的目标特征进行详细的描述和建模。正确建模是该技术的关键。目标跟踪技术也可称为目标锁定跟踪技术,就是在一定的区域范围内不丢失目标。该系统应用在机动车测速方面,应保证在60m距离内不丢失机动车目标。
具体方法是,通过多路采集卡将测速及车牌摄像机的图像信号实时传送到计算机中,由计算机进行实时分析计算。对图像进行目标识别,在判别出真正的目标后进行目标锁定并对锁定的目标进行实时跟踪,同时计算出车辆的精确位置并得出目标运动的矢量轨迹曲线图。图像中车辆的位置都是可以准确确定的,而每幅图像的采集时间是40ms(PAL制标准)固定不变,所以,可得出非常精确的位移差ΔS和时间差Δt。从矢量曲线图中取A、B两点,即可得出其位移差ΔS和时间差Δt,V=ΔS/Δt,式中:V—汽车运动速度,ΔS—A、B两点之间的精确距离,Δt—汽车由A点到达B点所需的准确时间。摄像机由上向下,俯视看路面,路面上任何车辆的一举一动都会在系统的监视之下。可以最大限度地获取路面上的车辆信息,所以得到的速度非常精确。
总之,不同原理的监测系统有其各自的优缺点,目前在国内应用最广泛的主要是地感线圈原理和雷达原理的监测系统,这两种监测系统在满足一定测速准确度要求的条件下价格相对便宜,性价比较高。相信随着科学技术的进步与发展,各种原理的监测系统会更加完善,发挥各自的长处,还会涌现出更多新的产品,为更好地维护道路交通安全服务。
•联系人:徐先生
•销售电话:18042002123(同微信号)非售后
•QQ:464333839
•地址:杭州市余杭区亿丰蔚蓝郡雅苑3幢10(商)